![]()

-
- Run a multipath analysis using a SP3 file and only mandatory arguments
- Run a multipath analysis using a RINEX navigation file with SNR, a defined datarate for ephemerides and with an elevation angle cut off at 10°
- Run analysis with several navigation files
- Run analysis without making plots
- Run analysis and use the Zstandard compression algorithm (ZSTD) to compress the pickle file storing the results
- Read a RINEX observation file
- Read a RINEX navigation file (v.3)
- Read in the results from an uncompressed Pickle file
- Read in the results from a compressed Pickle file
- Estimate the receiver position based on pseudoranges using SP3 file and print the standard deviation of the estimated position
- Estimate the receiver position based on pseudoranges using RINEX navigation file and print the DOP values
GNSS Multipath Analysis is a software tool for analyzing the multipath effect on Global Navigation Satellite Systems (GNSS). The core functionality is based on the MATLAB software GNSS_Receiver_QC_2020, but has been adapted to Python and includes additional features. A considerable part of the results has been validated by comparing the results with estimates from RTKLIB. This software will be further developed, and feedback and suggestions are therefore gratefully received. Don't hesitate to report if you find bugs or missing functionality. Either by e-mail or by raising an issue here in GitHub.
- Estimates the code multipath for all GNSS systems (GPS, GLONASS, Galileo, and BeiDou).
- Estimates the code multipath for all available signals/codes in the RINEX file.
- Provides statistics on the total number of cycle slips detected (using both ionospheric residuals and code-phase differences).
- Supports both RINEX navigation files (broadcast ephemerides) and SP3 files (precise ephemerides).
- Supports both RINEX v2.xx and v3.xx observation files.
- Generates various plots, including:
- Ionospheric delay over time and zenith-mapped ionospheric delay (combined).
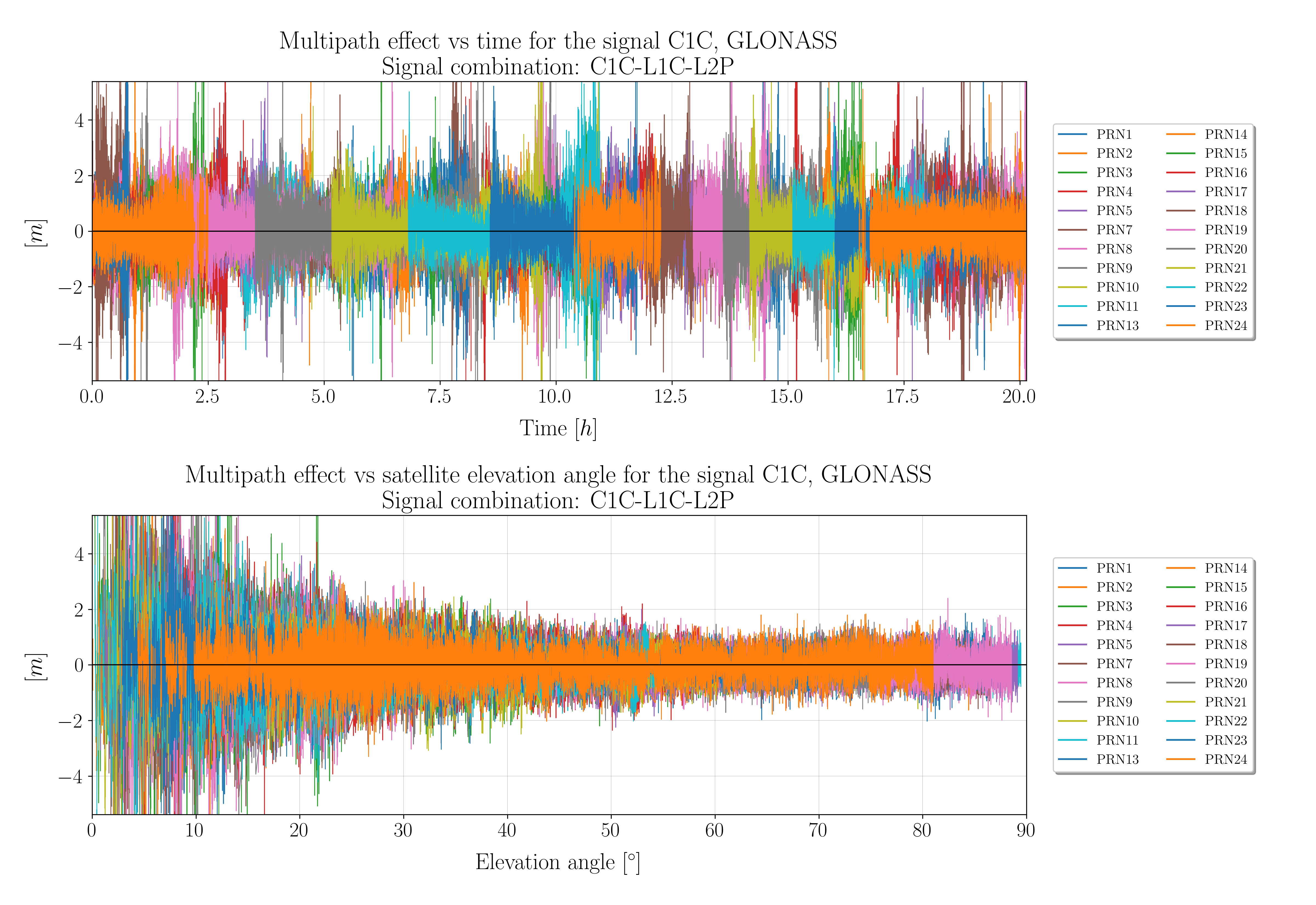
- The multipath effect plotted against time and elevation angle (combined).
- Bar plot showing multipath RMSE for each signal and system.
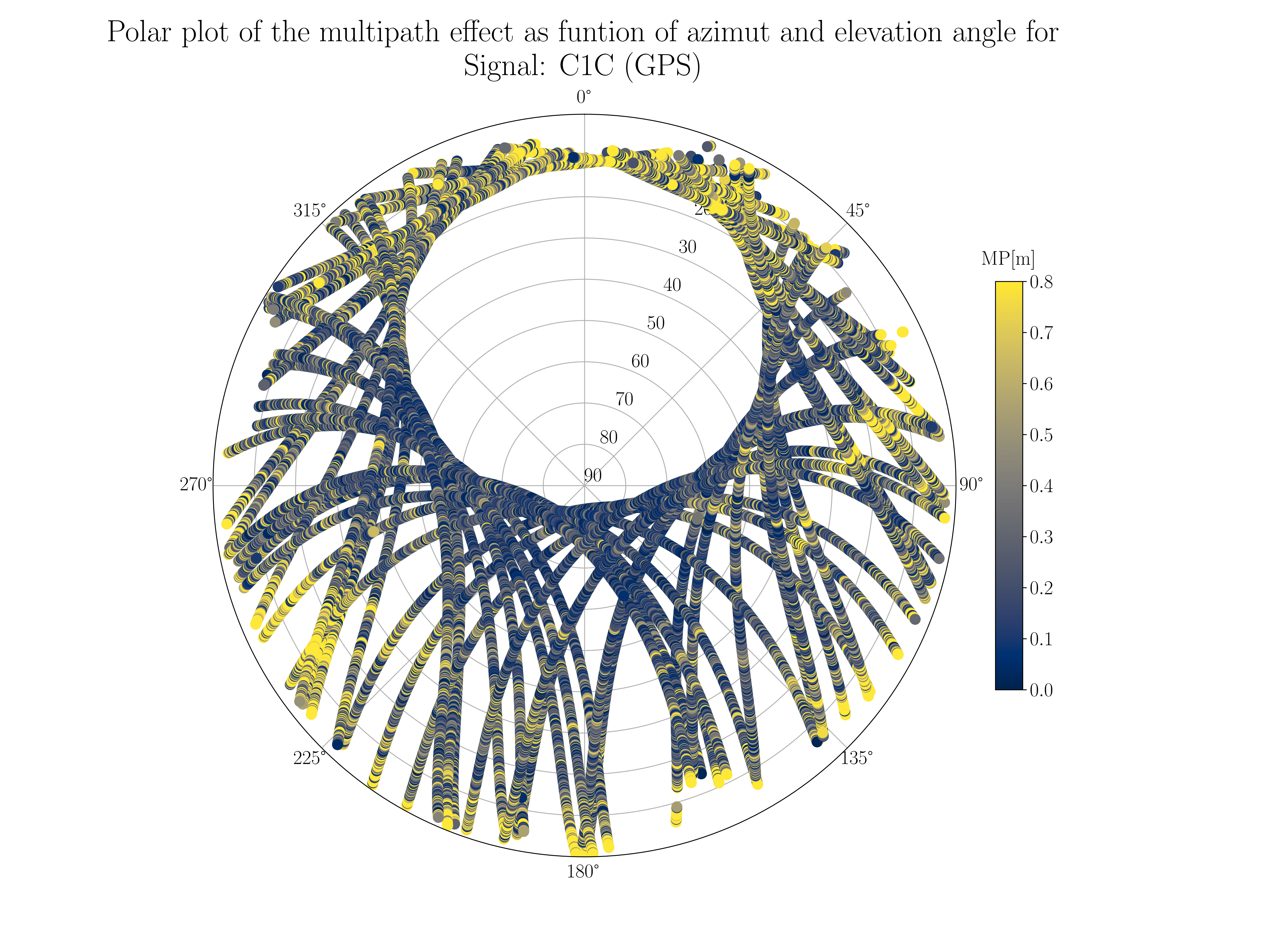
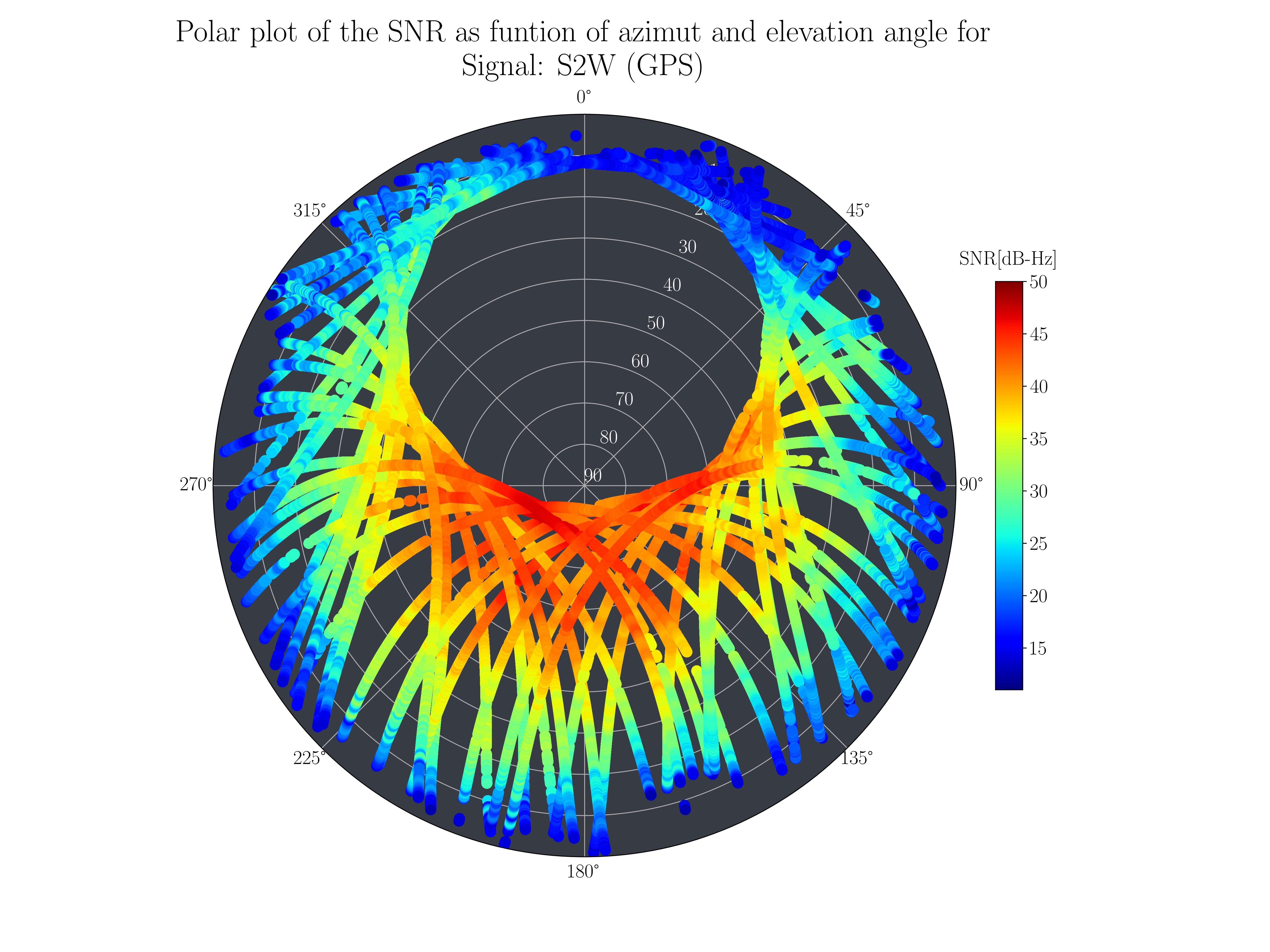
- Polar plot of the multipath effect and Signal-to-Noise Ratio (SNR).
- Polar plots of SNR and multipath.
- Polar plot of each observed satellite in the system.
- SNR versus time/elevation.
- Extracts GLONASS FCN from RINEX navigation files.
- Detects cycle slips and estimates the multipath effect.
- Exports results to CSV and a Python dictionary as a Pickle (both compressed and uncompressed formats are supported).
- Allows selection of specific navigation systems and signal bands for analysis.
- Estimate the approximate position of the receiver using pseudoranges from the RINEX observation file.
- Supports both SP3 and RINEX navigation files.
- The software will estimate the receiver's position if it is not provided in the header of the RINEX observation file.
- Supports user-defined Coordinate Reference System (CRS). The estimated coordinates can be delivered in the desired CRS.
- Calculates statistical measures for the estimated position, including:
- Residuals
- Sum of Squared Errors (SSE)
- Cofactor matrix
- Covariance matrix
- Dilution of Precision (PDOP, GDOP, and TDOP)
- Standard deviation of the estimated position
To install the software to your Python environment using pip:
pip install gnssmultipath- Python >=3.8: Ensure you have Python 3.8 or newer installed.
- LaTeX (optional): Required for generating plots with LaTeX formatting.
Note: In the example plots, TEX is used to get prettier text formatting. However, this requires TEX/LaTex to be installed on your computer. The program will first try to use TEX, and if it's not possible, standard text formatting will be used. So TEX/LaTex is not required to run the program and make plots.
- On Ubuntu:
sudo apt-get install texlive-full - On Windows: Download and install from MiKTeX
- On MacOS:
brew install --cask mactex
To run the GNSS Multipath Analysis, import the main function and specify the RINEX observation and navigation/SP3 files you want to use. To perform the analysis with default settings and by using a navigation file:
from gnssmultipath import GNSS_MultipathAnalysis
outputdir = 'path_to_your_output_dir'
rinObs_file = 'your_observation_file.XXO'
rinNav_file = 'your_navigation_file.XXN'
analysisResults = GNSS_MultipathAnalysis(rinObs_file,
broadcastNav1=rinNav_file,
outputDir=outputdir)If you have a SP3 file, and not a RINEX navigation file, you just replace the keyword argument broadcastNav1 with sp3NavFilename_1.
- Reads in the RINEX observation file
- Reads the RINEX navigation file or the precise satellite coordinates in SP3-format (depends on what’s provided)
- If a navigation file is provided, the satellite coordinates will be transformed from Kepler-elements to ECEF for GPS, Galileo and BeiDou. For GLONASS the navigation file is containing a state vector. The coordinates then get interpolated to the current epoch by solving the differential equation using a 4th order Runge-Kutta. If a SP3 file is provided, the interpolation is done using
Neville's algorithm. - Compute the satellites' elevation and azimuth angles. If the receiver's approximate position is not provided in the header of the RINEX observation file, the software automatically estimates it based on pseudoranges using the
GNSSPositionEstimatorclass. - Cycle slip detection by using both ionospheric residuals and a code-phase combination. These linear combinations are given as
The threshold values can be set by the user, and the default values are set to
- Multipath estimates get computed by making a linear combination of the code and phase observation. PS: A dual frequency receiver is necessary because observations from two different bands/frequency are needed.
where
- Based on the multipath estimates computed in step 6, both weighted and unweighted RMS-values get computed. The RMS value has unit meter, and is given by
For the weighted RMS value, the satellite elevation angle is used in a weighting function defined as
for every estimates with elevation angle
- Several plot will be generated (if not set to FALSE):
-
Ionospheric delay wrt time and zenith mapped ionospheric delay (combined)

-
The Multipath effect plotted wrt time and elevation angle (combined)

-
Barplot showing RMS values for each signal and system

-
Polar plot of the multipath effect as function of elevation angle and azimuth

-
Polar plot of each observed satellite in the system

-
Signal-To-Noise Ratio (SNR) plotted wrt time and elevation angle (combine)

-
Polar plot of Signal-To-Noise Ratio (SNR)

-
- Exporting the results as a pickle file which easily can be imported into python as a dictionary
- The results in form of a report get written to a text file with the same name as the RINEX observation file.
- The estimated values are also written to a CSV file by default






The GNSS_MultipathAnalysis function accepts several keyword arguments that allow for detailed customization of the analysis process. Below is a list of the first five arguments:
-
rinObsFilename (
str): Path to the RINEX 3 observation file. This is a required argument. -
broadcastNav1 (
Union[str, None], optional): Path to the first RINEX navigation file. Default isNone. -
broadcastNav2 (
Union[str, None], optional): Path to the second RINEX navigation file (if available). Default isNone. -
broadcastNav3 (
Union[str, None], optional): Path to the third RINEX navigation file (if available). Default isNone. -
broadcastNav4 (
Union[str, None], optional): Path to the fourth RINEX navigation file (if available). Default isNone.
More...
-
sp3NavFilename_1 (
Union[str, None], optional): Path to the first SP3 navigation file. Default isNone. -
sp3NavFilename_2 (
Union[str, None], optional): Path to the second SP3 navigation file (optional). Default isNone. -
sp3NavFilename_3 (
Union[str, None], optional): Path to the third SP3 navigation file (optional). Default isNone. -
desiredGNSSsystems (
Union[List[str], None], optional): List of GNSS systems to include in the analysis. For example,['G', 'R']to include only GPS and GLONASS. Default is all systems (None). -
phaseCodeLimit (
Union[float, int, None], optional): Critical limit that indicates cycle slip for phase-code combination in m/s. If set to0, the default value of6.667 m/swill be used. Default isNone. -
ionLimit (
Union[float, None], optional): Critical limit indicating cycle slip for the rate of change of the ionospheric delay in m/s. If set to0, the default value of0.0667 m/swill be used. Default isNone. -
cutoff_elevation_angle (
Union[int, None], optional): Cutoff angle for satellite elevation in degrees. Estimates with elevation angles below this value will be excluded. Default isNone. -
outputDir (
Union[str, None], optional): Path to the directory where output files should be saved. If not specified, the output will be generated in a sub-directory within the current working directory. Default isNone. -
plotEstimates (
bool, optional): Whether to plot the estimates. Default isTrue. -
plot_polarplot (
bool, optional): Whether to generate polar plots. Default isTrue. -
include_SNR (
bool, optional): If set toTrue, the Signal-to-Noise Ratio (SNR) from the RINEX observation file will be included in the analysis. Default isTrue. -
save_results_as_pickle (
bool, optional): IfTrue, the results will be saved as a binary pickle file. Default isTrue. -
save_results_as_compressed_pickle (
bool, optional): IfTrue, the results will be saved as a binary compressed pickle file using zstd compression. Default isFalse. -
write_results_to_csv (
bool, optional): IfTrue, a subset of the results will be exported as a CSV file. Default isTrue. -
output_csv_delimiter (
str, optional): The delimiter to use for the CSV file. Default is a semicolon (;). -
nav_data_rate (
int, optional): The desired data rate for ephemerides in minutes. A higher value speeds up processing but may reduce accuracy. Default is60minutes. -
includeResultSummary (
Union[bool, None], optional): Whether to include a detailed summary of statistics in the output file, including for individual satellites. Default isNone. -
includeCompactSummary (
Union[bool, None], optional): Whether to include a compact overview of statistics in the output file. Default isNone. -
includeObservationOverview (
Union[bool, None], optional): Whether to include an overview of observation types for each satellite in the output file. Default isNone. -
includeLLIOverview (
Union[bool, None], optional): Whether to include an overview of LLI (Loss of Lock Indicator) data in the output file. Default isNone. -
use_LaTex (
bool, optional): IfTrue, LaTeX will be used for rendering text in plots, requiring LaTeX to be installed on your system. Default isTrue.
- analysisResults (
dict): A dictionary containing the results of the analysis for all GNSS systems.
- Python Versions: Compatible with Python 3.8 and above.
- Dependencies: All dependencies will be automatically installed with
pip install gnssmultipath.
This project is licensed under the MIT License - see the LICENSE file for details.
from gnssmultipath import GNSS_MultipathAnalysis
rinObs_file = 'OPEC00NOR_S_20220010000_01D_30S_MO_3.04'
SP3_file = 'SP3_20220010000.eph'
analysisResults = GNSS_MultipathAnalysis(rinex_obs_file=rinObs_file, sp3NavFilename_1=SP3_file)Run a multipath analysis using a RINEX navigation file with SNR, a defined datarate for ephemerides and with an elevation angle cut off at 10°
from gnssmultipath import GNSS_MultipathAnalysis
# Input arguments
rinObs_file = 'OPEC00NOR_S_20220010000_01D_30S_MO_3.04'
rinNav_file = 'BRDC00IGS_R_20220010000_01D_MN.rnx'
output_folder = 'C:/Users/xxxx/Results_Multipath'
cutoff_elevation_angle = 10 # drop satellites lower than 10 degrees
nav_data_rate = 60 # desired datarate for ephemerides (to improve speed)
analysisResults = GNSS_MultipathAnalysis(rinex_obs_file=rinObs_file,
broadcastNav1=rinNav_file,
include_SNR=True,
outputDir=output_folder,
nav_data_rate=nav_data_rate,
cutoff_elevation_angle=cutoff_elevation_angle)from gnssmultipath import GNSS_MultipathAnalysis
outputdir = 'path_to_your_output_dir'
rinObs = "OPEC00NOR_S_20220010000_01D_30S_MO_3.04_croped.rnx"
# Define the path to your RINEX navigation file
rinNav1 = "OPEC00NOR_S_20220010000_01D_CN.rnx"
rinNav2 = "OPEC00NOR_S_20220010000_01D_EN.rnx"
rinNav3 = "OPEC00NOR_S_20220010000_01D_GN.rnx"
rinNav4 = "OPEC00NOR_S_20220010000_01D_RN.rnx"
analysisResults = GNSS_MultipathAnalysis(rinObs,
broadcastNav1=rinNav1,
broadcastNav2=rinNav2,
broadcastNav3=rinNav3,
broadcastNav4=rinNav4,
outputDir=outputdir)from gnssmultipath import GNSS_MultipathAnalysis
rinObs_file = 'OPEC00NOR_S_20220010000_01D_30S_MO_3.04'
SP3_file = 'SP3_20220010000.eph'
analysisResults = GNSS_MultipathAnalysis(rinex_obs_file=rinObs_file, sp3NavFilename_1=SP3_file, plotEstimates=False)Run analysis and use the Zstandard compression algorithm (ZSTD) to compress the pickle file storing the results
from gnssmultipath import GNSS_MultipathAnalysis
rinObs_file = 'OPEC00NOR_S_20220010000_01D_30S_MO_3.04'
SP3_file = 'SP3_20220010000.eph'
analysisResults = GNSS_MultipathAnalysis(rinex_obs_file=rinObs_file, sp3NavFilename_1=SP3_file, save_results_as_compressed_pickle=True)from gnssmultipath import readRinexObs
rinObs_file = 'OPEC00NOR_S_20220010000_01D_30S_MO_3.04'
GNSS_obs, GNSS_LLI, GNSS_SS, GNSS_SVs, time_epochs, nepochs, GNSSsystems, \
obsCodes, approxPosition, max_sat, tInterval, markerName, rinexVersion, recType, timeSystem, leapSec, gnssType, \
rinexProgr, rinexDate, antDelta, tFirstObs, tLastObs, clockOffsetsON, GLO_Slot2ChannelMap, success = \
readRinexObs(rinObs_file)from gnssmultipath import Rinex_v3_Reader
rinNav_file = 'BRDC00IGS_R_20220010000_01D_MN.rnx'
navdata = Rinex_v3_Reader().read_rinex_nav(rinNav_file, data_rate=60)from gnssmultipath import PickleHandler
path_to_picklefile = 'analysisResults.pkl'
result_dict = PickleHandler.read_pickle(path_to_picklefile)from gnssmultipath import PickleHandler
path_to_picklefile = 'analysisResults.pkl'
result_dict = PickleHandler.read_zstd_pickle(path_to_picklefile)Estimate the receiver position based on pseudoranges using SP3 file and print the standard deviation of the estimated position
from gnssmultipath import GNSSPositionEstimator
import numpy as np
rinObs = 'OPEC00NOR_S_20220010000_01D_30S_MO_3.04_croped.rnx'
sp3 = 'Testfile_20220101.eph'
# Set desired time for when to estimate position and which system to use
desired_time = np.array([2022, 1, 1, 1, 5, 30.0000000])
desired_system = "G" # GPS
gnsspos, stats = GNSSPositionEstimator(rinObs,
sp3_file = sp3,
desired_time = desired_time,
desired_system = desired_system,
elevation_cut_off_angle = 15
).estimate_position()
print('Estimated coordinates in ECEF (m):\n' + '\n'.join([f'{axis} = {coord}' for axis, coord in zip(['X', 'Y', 'Z'], np.round(gnsspos[:-1], 3))]))
print('\nStandard deviation of the estimated coordinates (m):\n' + '\n'.join([f'{k} = {v}' for k, v in stats["Standard Deviations"].items() if k in ['Sx', 'Sy', 'Sz']]))Estimate the receiver position based on pseudoranges using RINEX navigation file and print the DOP values
from gnssmultipath import GNSSPositionEstimator
import numpy as np
rinObs = 'OPEC00NOR_S_20220010000_01D_30S_MO_3.04_croped.rnx'
rinNav = 'BRDC00IGS_R_20220010000_01D_MN.rnx'
# Set desired time for when to estimate position and which system to use
desired_time = np.array([2022, 1, 1, 2, 40, 0.0000000])
desired_system = "R" # GLONASS
gnsspos, stats = GNSSPositionEstimator(rinObs,
rinex_nav_file = rinNav,
desired_time = desired_time,
desired_system = desired_system,
elevation_cut_off_angle = 10).estimate_position()
print('Estimated coordinates in ECEF (m):\n' + '\n'.join([f'{axis} = {coord}' for axis, coord in zip(['X', 'Y', 'Z'], np.round(gnsspos[:-1], 3))]))
print('\nStandard deviation of the estimated coordinates (m):\n' + '\n'.join([f'{k} = {v}' for k, v in stats["Standard Deviations"].items() if k in ['Sx', 'Sy', 'Sz']]))
print(f'\nDOP values:\n' + '\n'.join([f'{k} = {v}' for k, v in stats["DOPs"].items()]))Define a specific Coordinate Reference System (CRS) to output the estimated receiver's coordinates. In this case the coordinates will be given in WGS84 UTM zone 32N (EPSG:32632) and ellipsoidal heights.
Note: You can use the EPSG GeoRepository to find the EPSG code for the desired CRS.
from gnssmultipath import GNSSPositionEstimator
import numpy as np
rinObs = 'OPEC00NOR_S_20220010000_01D_30S_MO_3.04_croped.rnx'
rinNav = 'BRDC00IGS_R_20220010000_01D_MN.rnx'
# Set desired time for when to estimate position and which system to use
desired_time = np.array([2022, 1, 1, 1, 5, 30.0000000])
desired_system = "E" # GPS
desired_crs = "EPSG:32632" # Desired CRS for the estimated receiver coordinates (WGS84 UTM zone 32N)
gnsspos, stats = GNSSPositionEstimator(rinObs,
rinex_nav_file=rinNav,
desired_time = desired_time,
desired_system = desired_system,
elevation_cut_off_angle = 10,
crs=desired_crs).estimate_position()
print('Estimated coordinates in ECEF (m):\n' + '\n'.join([f'{axis} = {coord}' for axis, coord in zip(['Eastin', 'Northing', 'Height (ellipoidal)'], np.round(gnsspos[:-1], 3))]))This section explains step-by-step how satellite positions in Keplerian elements are converted to Earth-Centered Earth-Fixed (ECEF) coordinates. The explanation is showing how the kepler2ecef method has implemented this conversion. This approch works for GPS, Galileo and BeiDou, but not for GLONASS. GLONASS is not storing the satellite positions as Keplerian elements, but uses a state vector instead. The coordinates then get interpolated to the current epoch by solving the differential equation using a 4th order Runge-Kutta.
-
Gravitational Constant and Earth's Mass (
$GM$ ):
-
Earth's Angular Velocity (
$\omega_e $ ):
-
Speed of Light (
$c$ ):
Inputs:
- Keplerian elements from the RINEX navigation file.
- Receiver's ECEF coordinates
$(x_\text{rec}, y_\text{rec}, z_\text{rec})$ .
Mean Motion (
where
Corrected Mean Motion (
Time Since Reference Epoch (
Mean Anomaly (
where
Use iterative approximation to solve Kepler's equation:
Repeat until convergence, where:
where
Compute
Use the arctangent to find
Corrected Argument of Latitude (
Corrected Radius (
Corrected Inclination (
Account for Earth's rotation:
Convert from the orbital frame to the Earth-centered, Earth-fixed frame:
Account for relativistic effects:
If the receiver position is known, adjust for the Earth's rotation during signal transmission using an iterative process to correct for the Sagnac effect. The Sagnac effect accounts for the Earth's rotation during the signal's travel time from the satellite to the receiver. This correction ensures that the satellite's position aligns with the time of signal transmission, adjusting for the Earth's rotation.
The Earth's rotation during the signal's travel introduces a positional error if uncorrected. This adjustment ensures high-accuracy satellite positioning and is implemented in the kepler2ecef method part of the Kepler2ECEF class, and the iterative method ensures precise compensation for the Earth's rotation during signal travel time.
Initialize Variables:
-
$\text{TRANS}_0$ : Approximate initial signal travel time, e.g., 0.075 seconds. -
$\text{TRANS}$ : Variable to store updated travel time. -
$j$ : Iteration counter.
Iterative Process:
Update the longitude of the ascending node (
Recalculate ECEF coordinates:
Compute the distance (
Update the travel time:
Convergence:
Repeat the process until:
Where
This section explains the steps taken to interpolate GLONASS state vectors using the 4th-order Runge-Kutta method, based on the interpolate_glonass_coord_runge_kutta function provided.
The 4th-order Runge-Kutta method is a numerical technique to approximate the solution of ordinary differential equations (ODEs). It iteratively updates the state vector based on the derivatives computed at intermediate steps.
The GLONASS equations of motion describe how the satellite's state (position and velocity) evolves over time under the influence of gravitational and perturbative forces. These equations are differential equations, as they involve derivatives of the satellite's position and velocity.
The state vector
Change in Position
which equals the velocity components
Change in Velocity
depends on:
- Gravitational forces.
- Perturbations (e.g., due to Earth's oblateness).
-
External accelerations (
$J_x, J_y, J_z$ ).
- Ephemerides Data: Broadcast ephemerides, including position, velocity, acceleration, and clock corrections, from a RINEX navigation file.
- Observation Epochs: Array of observation times, given as GPS week and time of week (TOW).
- Read ephemerides parameters for the GLONASS satellite:
-
$x_e, y_e, z_e$ : Satellite positions at reference time$t_e$ (PZ-90) [km]. -
$v_x, v_y, v_z$ : Satellite velocities at$t_e$ [km/s]. -
$J_x, J_y, J_z$ : Acceleration components at$t_e$ $[km/s^2]$ . -
$\tau_N$ : Clock bias [s]. -
$\gamma_N$ : Clock frequency bias.
-
Positions, velocities, and accelerations are converted from kilometers to meters.
Convert the reference time
Compute the time difference between observation and reference epochs:
Satellite clock error:
Clock rate error:
Initial state vector:
Initial acceleration vector:
- Time step (
$t_\text{step}$ ): 90 seconds, adjusted based on the magnitude of$\Delta t$ . - Iterate using the 4th-order Runge-Kutta method until
$\Delta t$ is less than a small threshold (e.g.,$10^{-9}$ ).
Solving the system of ordinary differential equations (ODEs) using the 4th-order Runge-Kutta method. Runge-Kutta interpolation method implemented in the glonass_diff_eq method apart of the GLOStateVec2ECEF class.
this method will be refered to as
Calculate Derivatives: Compute the derivatives using the current state vector and acceleration:
Update State Vector:
Compute the updated state vector (
Update Time: Increment the time to the next step:
Reduce
-
Position (
$x, y, z$ ) [m]: Extracted from the final state vector. -
Velocity (
$v_x, v_y, v_z$ ) [m/s]: Extracted from the final state vector. -
Clock Error (
$\text{clock error}$ ) [s]: Calculated during initialization. -
Clock Rate Error (
$\text{clock rate error}$ ) [s/s]: Calculated during initialization.
The derivatives of the state vector (
Radial Distance (
Acceleration Terms: Gravitational acceleration:
Perturbation due to Earth's oblateness (
- Equations of Motion:
where:
-
$\mu = 3.9860044 \times 10^{14}$ $[m^3/s^2]$ is the gravitational constant. -
$J_2 = 1.0826257 \times 10^{-3}$ is the Earth's oblateness factor. -
$\omega = 7.292115 \times 10^{-5}$ $[rad/s]$ is the Earth's rotation rate. -
$a_e = 6378136.0$ $[m]$ is the semi-major axis of the Earth (PZ-90 ellipsoid).
This method ensures precise interpolation of GLONASS satellite positions and velocities at user-specified epochs.
This section explains the steps taken by the SP3Interpolator Python class to compute precise satellite positions from SP3 files. The method leverages Neville's algorithm to perform polynomial interpolation for satellite positions
-
SP3 Data:
Satellite positions
$(X_i, Y_i, Z_i)$ and clock biases$\text{Bias}_i$ are provided at discrete epochs$\text{Epoch}_i$ . They are extracted from the SP3 file, and the units of the coordiantes are converted from kilometers to meters. The clock bias is converted from microseconds to seconds. -
Target Epoch:
The observation times (
$t$ ) where interpolation is required. The target epoch is typically the obervation time/epochs from the RINEX observation file.
For a given target time
- Compute the time difference:
Here,
Neville's algorithm computes the interpolated value
$x_i = \text{Epoch}_i$ -
$p_{i,0}$ is initialized with the satellite data, such as$X_i$ ,$Y_i$ ,$Z_i$ , or$\text{Bias}_i$ .
The recursive interpolation formula is:
Where:
-
$p_{i,0}(t) = y_i$ (initial values) and$j$ is the current degree of the interpolating polynomial. -
$t$ represents the target value or interpolation point at which the function$P(t)$ is being approximated.- In the context of satellite interpolation
$t$ is the target epoch or the observation time (in seconds since the reference epoch) for which you are interpolating satellite positions or clock biases.$t$ falls between the nearest known SP3 epochs,$x_i$ , and is used for interpolation.$t$ determines the relative weights of the contributions from the known data points$(x_i, y_i)$ to the final interpolated value. For example if you're interpolating the$X$ -coordinate of a satellite,$t$ is the observation time at which you want to know the satellite's$X$ -position. The algorithm uses$t$ to calculate how much influence each known SP3 epoch$x_i$ and corresponding$y_i$ (satellite's$X$ -position at$x_i$ ) has on the result.
- In the context of satellite interpolation
- Index
$i$ represents the starting point of the interval in the dataset. For example,$p_{i,j}$ corresponds to the interpolated value using points starting from$x_i$ . - Index
$j$ represents the degree of the polynomial being calculated.$j=0$ corresponds to the initial dataset values ($p_{i,0} = y_i$ ), while$j=n-1$ represents the final interpolated polynomial.
- Begin with
$p_{i,0} = y_i$ . - Compute higher-degree polynomials:
- After completing
$j = n-1$ , the interpolated value is$P(t) = p_{0,n-1}(t)$ .
Repeat the above steps independently for
Given
The interpolated value is:
Click to expand the code
import numpy as np
def interpolate_satellite_data(observation_time, nearest_times, nearest_positions, nearest_clock_biases):
"""
Interpolates satellite positions and clock bias for a single observation time using Neville's algorithm.
Parameter:
----------
observation_time : float. Target epoch in seconds (time for which interpolation is required).
nearest_times : np.ndarray. Array of closest times (epochs) from the SP3 file.
nearest_positions : np.ndarray. Array of closest satellite positions (X, Y, Z) from the SP3 file.
nearest_clock_biases : np.ndarray. Array of closest clock biases from the SP3 file.
Returns:
-------
interpolated_position : np.ndarray. Interpolated satellite position (X, Y, Z) at the target epoch.
interpolated_clock_bias : float. Interpolated clock bias at the target epoch.
"""
def neville_interpolate(x, y, n):
"""
Perform polynomial interpolation using Neville's algorithm.
Parameters:
----------
x : np.ndarray. Differences between nearest times and the target time.
y : np.ndarray. Satellite data to interpolate (positions or biases).
n : int. Number of data points.
Returns:
-------
Interpolated value (float)
"""
y_copy = y.copy()
for j in range(1, n):
for i in range(n - j):
y_copy[i] = ((x[i + j] * y_copy[i] - x[i] * y_copy[i + 1]) / (x[i + j] - x[i]))
return y_copy[0]
# Compute time differences relative to the target epoch
time_diff = nearest_times - observation_time
# Interpolate satellite positions (X, Y, Z)
interpolated_position = np.zeros(3)
for i in range(3): # Loop over X, Y, Z
interpolated_position[i] = neville_interpolate(time_diff, nearest_positions[:, i], len(nearest_times))
# Interpolate clock bias
interpolated_clock_bias = neville_interpolate(time_diff, nearest_clock_biases, len(nearest_times))
return interpolated_position, interpolated_clock_bias
if __name__ == "__main__":
# Example usage on dummy data
observation_time = 100000 # Example observation time in seconds
nearest_times = np.array([99990, 99995, 100000, 100005, 100010]) # Example nearest times
nearest_positions = np.array([
[1000, 2000, 3000], # Example X, Y, Z positions
[1010, 2010, 3010],
[1020, 2020, 3020],
[1030, 2030, 3030],
[1040, 2040, 3040]
])
nearest_clock_biases = np.array([0.0005, 0.0006, 0.0007, 0.00008, 0.00009]) # Example clock biases
interpolated_position, interpolated_clock_bias = interpolate_satellite_data(
observation_time, nearest_times, nearest_positions, nearest_clock_biases
)
print("Interpolated Position (X, Y, Z):", interpolated_position)
print("Interpolated Clock Bias:", interpolated_clock_bias)This section describes how the software estimates the approximate receiver position using pseudoranges and satellite positions through an iterative least-squares adjustment.
-
Satellite Positions: The satellite coordinates
$(X, Y, Z)$ in ECEF coordinates. -
Pseudoranges (
$R_{ji}$ ): The measured distance between the receiver and satellites, corrected for clock errors and relativistic effects. -
Initial Receiver Position (
$x, y, z$ ): An approximate starting position for the receiver in ECEF coordinates. Can be set to$(0, 0, 0)$ initially. -
Clock Bias (
$dT_0$ ): An initial estimate of the receiver's clock bias.
For each satellite, compute the geometric distance between the receiver and the satellite:
The observation equation for pseudoranges is non-linear. Before we can use linear algebra, we need to linearize it using a first-order Taylor series expansion. This linearization assumes small corrections to the initial approximate values of
where
where
The design matrix
This linearized system is solved iteratively, updating
The observation vector
The normal matrix is computed as:
The correction vector is computed as:
Solve the linear system:
where
Update the receiver's position and clock bias:
Repeat steps 2–8 until the largest correction in
Initialization:
- Start with approximate receiver position
Convergence Check:
- After each iteration, compute the improvement:
- If the improvement is below the threshold, stop the iteration.
Satellite Filtering:
- After convergence, filter out satellites with low elevation angles (e.g.,
$< 15^\circ$ ). - Recompute the receiver position using the remaining satellites.
-
Receiver Position (
$x, y, z$ ): The estimated ECEF coordinates of the receiver. -
Clock Bias (
$dT_i$ ): The estimated receiver clock bias in seconds. - Statistical Analysis: Includes residuals, variances, and diagnostics for the least-squares solution.
This iterative least-squares approach ensures high accuracy in estimating the receiver's position while accounting for satellite clock errors and relativistic corrections.
This section describes the key statistical parameters computed during the GNSS positioning process, their significance, and how they are calculated.
Residuals represent the differences between observed and computed values:
where
The SSE quantifies the total error in the fit:
Significance: A smaller SSE indicates a better fit.
The standard deviation of unit weight measures the average residual per degree of freedom:
where
The cofactor matrix is computed as:
where
The covariance matrix is computed as:
Significance: The covariance matrix is crucial for evaluating parameter uncertainties.
DOP metrics quantify the geometric quality of the satellite configuration:
- Positional DOP (PDOP):
- Time DOP (TDOP):
- Geometric DOP (GDOP):
where
Standard deviations represent the precision of the estimated parameters:
Significance: These values quantify the uncertainty in the estimated receiver coordinates and clock bias.
The following steps summarize the computation of these statistical parameters:
- Compute Residuals
- Calculate SSE
- Compute
$S_0$
- Derive
$Q_{xx}$
- Calculate
$C_{xx}$
-
Extract Cofactors (
$q_X, q_Y, q_Z, q_{dT}$ ) from$Q_{xx}$ -
Compute DOPs
- Calculate Standard Deviations
A comprehensive statistical report includes:
-
Residuals (
$V$ ): Quantifies model fit. - SSE: Total error.
-
Standard Deviation of Unit Weight (
$S_0$ ): Average error per degree of freedom. -
Covariance Matrix (
$C_{xx}$ ): Absolute parameter precision. -
Cofactor Matrix (
$Q_{xx}$ ): Diagonal elements used to compute DOP values. - DOPs: Geometric quality of satellite configuration. Low values indicates good satellite geometry.
- Standard Deviations: Uncertainty in receiver coordinates and clock bias.